
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- 오블완
- Python
- 프림
- 내란수괴
- 파비우스 전략
- 왈왈왈
- dfs
- dfs 백트래킹
- 윤석열 내란수괴
- 백준
- 이분 탐색
- 내란죄
- BFS
- 분할정복
- 알고리즘
- ccw
- 투 포인터
- DP
- 비상계엄
- Prim
- 내란수괴 윤석열
- 윤석열
- 재귀함수
- 티스토리챌린지
- 유니온 파인드
- 다익스트라
- 민주주의
- 구조론
- LCA
- union find
- Today
- Total
Toolofv 님의 블로그
[Python] 백준 - 20149 선분 교차 3 본문
백준 - 20149 선분 교차 3
첫째 줄에 L1의 양 끝 점 x1, y1, x2, y2가, 둘째 줄에 L2의 양 끝 점 x3, y3, x4, y4가 주어진다.
www.acmicpc.net

문제해결방법 -
1. 사선공식(신발끈 공식)을 이용하면 주어진 3점의 좌표 방향에 따라 1, 0, -1을 출력한다는 것을 알 수 있다.
1) (x1, y1) (x2, y2) 직선에서 각 점 (x3, y3) 과 (x4, y4)을 사선공식으로 돌린다. 결과를 곱했을 때 0, -1의 경우만 교점이 있을 가능성이 있다.
2) (x3, y3), (x4, y4) 직선에서도 각 점 (x1, y1) 과 (x2, y2)을 사선공식으로 돌린다. 위와 같다.
2. 위 결과가 둘 다 0, -1인 경우만 본다. 예외적으로 기울기가 같을 때, 만나지 않는 경우가 있을 수 있으므로, 범위를 체크한다. <- 여기서 기울기가 같으면서 만나지 않는 경우가 추려진다.
1) 두 직선의 기울기가 같을 때, 접점이 하나면 p1, p2 중 공통되는 부분이 접점이 된다.
2) 두 직선의 기울기가 같을 때, 접점이 많으면 check1함수의 False로 인해 접점은 출력하지 않게 된다.
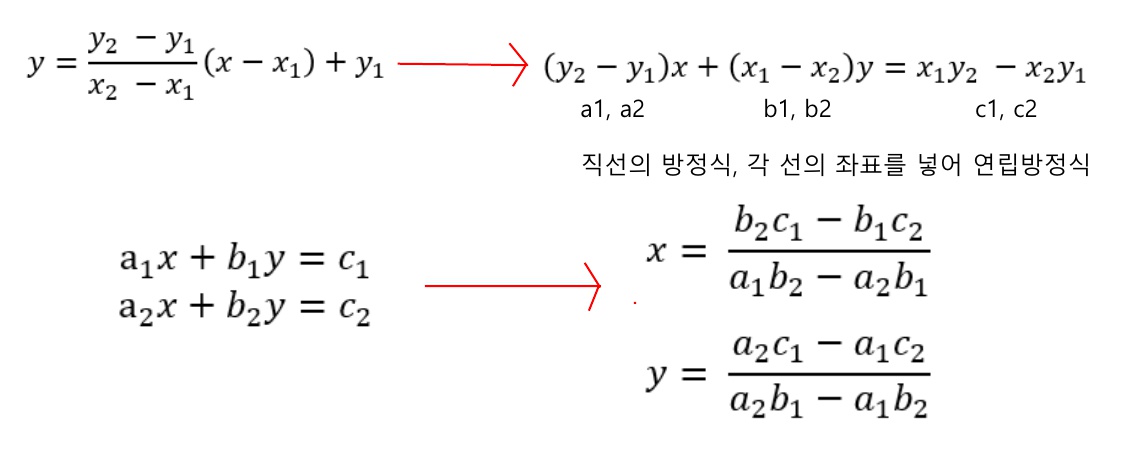
3. 기울기가 같지 않고 A , B 가 1이 아니라 해(접점)가 있을 경우, 두 직선의 방정식을 연립하여, (x, y)좌표로 표현되는 해(접점)를 출력한다. (위 조건대로 진행할 경우 접점이 있고 그 접점은 하나일 것이므로)
4. A , B 는 -1이거나 0일 때만 접점이 있다는 말이 되므로 그외 경우라면 0을 출력한다.
-코드
import sys
sys.setrecursionlimit(10**6)
from collections import deque
input = sys.stdin.readline
x1, y1, x2, y2 = map(int, input().split())
x3, y3, x4, y4 = map(int, input().split())
p1, p2, p3, p4 = (x1, y1), (x2, y2), (x3, y3), (x4, y4)
ans = 0
def ccw(a, b, c):
l = a[0]*b[1]+b[0]*c[1]+c[0]*a[1]
r = b[0]*a[1]+c[0]*b[1]+a[0]*c[1]
if l-r < 0:
return 1
elif l-r == 0:
return 0
else:
return -1
def check1(a, b, c, d):
return min(a, b) == max(c, d) or max(a, b) == min(c, d)
def check2(x1, x2, x3, x4, y1, y2, y3, y4):
A = min(x1, x2) > max(x3, x4) or min(x3, x4) > max(x1, x2)
B = min(y1, y2) > max(y3, y4) or min(y3, y4) > max(y1, y2)
return A or B
def sol(p1, p2, p3, p4):
a1 = p2[1]-p1[1]
b1 = p1[0]-p2[0]
c1 = p1[0]*p2[1]-p1[1]*p2[0]
a2 = p4[1]-p3[1]
b2 = p3[0]-p4[0]
c2 = p3[0]*p4[1]-p3[1]*p4[0]
x = (b2*c1-b1*c2)/(a1*b2-a2*b1)
y = (a2*c1-a1*c2)/(a2*b1-a1*b2)
return (x, y)
A = ccw(p1, p2, p3) * ccw(p1, p2, p4)
B = ccw(p3, p4, p1) * ccw(p3, p4, p2)
if A <= 0 and B <= 0 and not check2(x1, x2, x3, x4, y1, y2, y3, y4):
print(1)
if (x2-x1)*(y4-y3) == (x4-x3)*(y2-y1):
if check1(x1, x2, x3, x4):
if p1 in [p3, p4]:
print(*p1)
elif p2 in [p3, p4]:
print(*p2)
else:
print(*sol(p1, p2, p3, p4))
else:
print(0)
'Algorithm' 카테고리의 다른 글
| [Python] 백준 - 1311 할 일 정하기 1 (0) | 2024.07.31 |
|---|---|
| [Python] 백준 - 7869 두 원 (0) | 2024.07.29 |
| [Python] 백준 - 6549 히스토그램에서 가장 큰 직사각형 (2) | 2024.07.23 |
| [Python] 백준 - 25308 방사형 그래프 (3) | 2024.07.20 |
| [Python] 백준 - 1949 우수 마을 (0) | 2024.07.16 |



